Stacked Learning to Search for Scene Labeling
 Illustration
Illustration
Abstract
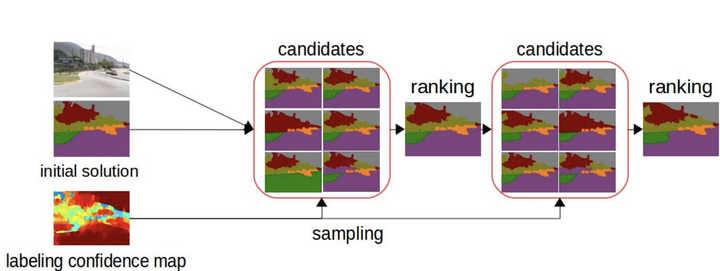
— Search-based structured prediction methods have shown promising successes in both computer vision and natural language processing recently. However, most existing searchbased approaches lead to a complex multi-stage learning process, which is ill-suited for scene labeling problems with a highdimensional output space. In this paper, a stacked learning to search method is proposed to address scene labeling tasks. We design a simplified search process consisting of a sequence of ranking functions, which are learned based on a stacked learning strategy to prevent over-fitting. Our method is able to encode rich prior knowledge by incorporating a variety of local and global scene features. In addition, we estimate a labeling confidence map to further improve the search efficiency from two aspects first, it constrains the search space more effectively by pruning out low-quality solutions based on confidence scores and second, we employ the confidence map as an additional ranking feature to improve its prediction performance and thus reduce the searchsteps. Our approach is evaluated on both semantic segmentation and geometric labeling tasks, including the Stanford Background, Sift Flow, Geometric Context, and NYUv2 RGB-D data set. The competitive results demonstrate that our stacked learning to search method provides an effective alternative paradigm for scene labeling.
Xuming He
Associate Professor
My research interests include few/low-shot learning, graph neural networks and video understanding.